Inici » Casos d’èxit »
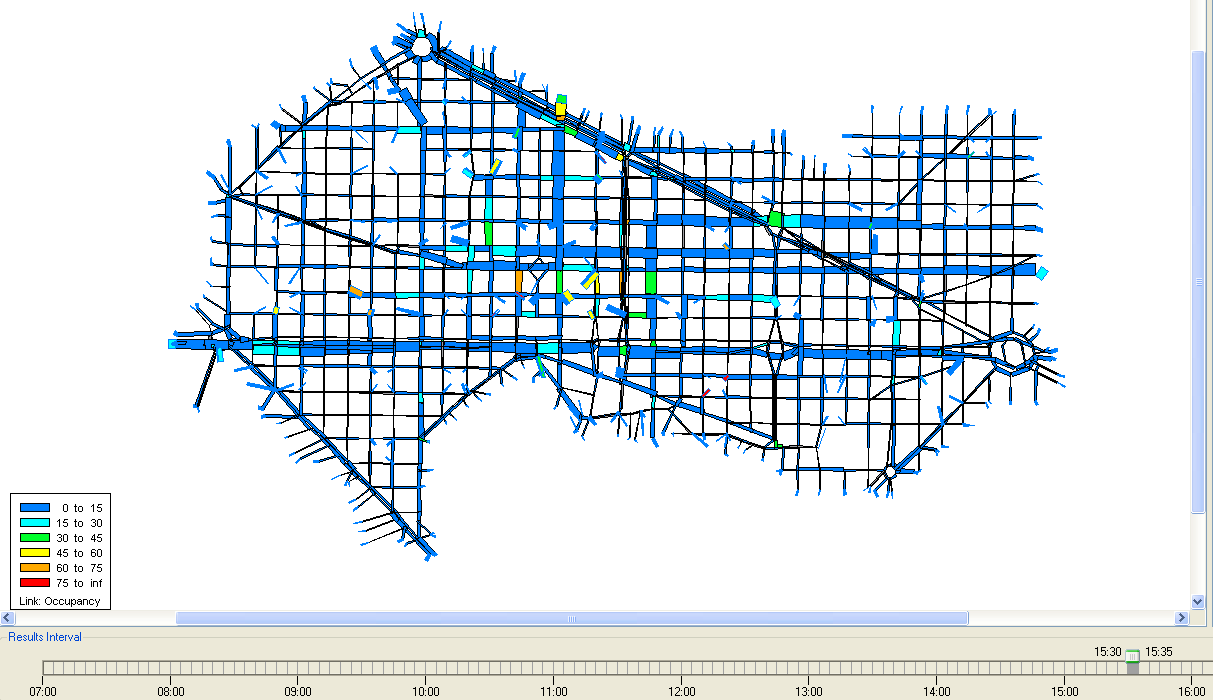
El projecte In4Mo ha tingut com a objectiu principal el desenvolupament de les aplicacions que constitueixen el nucli de la Smart Mobility, un dels pilars fonamentals del concepte de Smart City: la provisió d’informació per als sistemes d’informació de tràfic, en qualsevol de les seves formes, i especialment la dels “personal journey planners” i els sistemes de Gestió Activa del Tràfic, que permeten que el responsable de la gestió de la xarxa vial pugui tenir una visió i estimació adequades de l’estat de la xarxa vial i de la seva evolució plausible a curt termini, per prendre decisions més eficients.
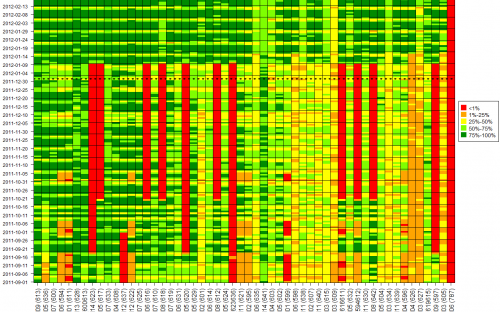
In4Mo ha estat dissenyant i desenvolupat en funció d’escenaris tecnològics previsibles en el curt-mig termini, on coexisteixen les tecnologies tradicionals de detecció de tràfic (per exemple les espires d’inducció magnètica) amb les tecnologies emergents (per exemple, magnetòmetres), entre les quals tenen un paper rellevant les TIC (Bluetooth, GPS…) les penetracions i tendències de penetració de les quals, permeten comptar amb elles per desenvolupar sistemes més eficients.
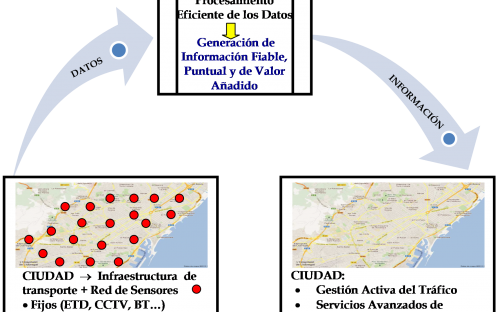
La tesi fonamental de In4Mo és que la tecnologia, és a dir la sensorització de la ciutat, és una condició necessària, però no suficient, per a la generació d’informació fiable, puntual i de valor afegit, és a dir disponible en el lloc i l’instant en què és necessària, en altres termes, que el grau de “smartness” és resultat combinació eficient de dades i el seu processament.
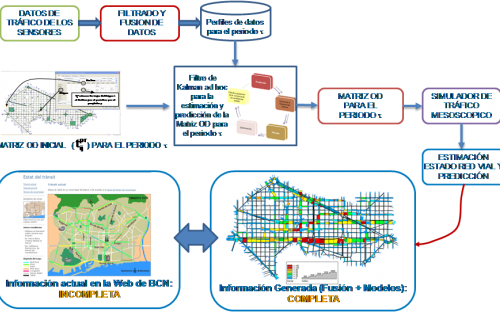
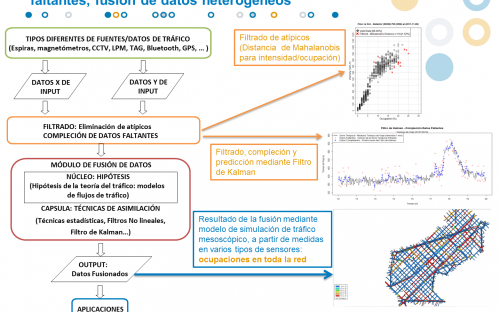
Però les dades proporcionades per les mesures de sensors de diferents tecnologies són heterogenies per la qual cosa l’activitat innovadora primordial de In4Mo ha estat la proposta d’una metodologia per al Filtrat, Fusió i Completesa de dades que incorpora i integra una varietat de mètodes d’anàlisis i processament, flexibles i eficients, que constitueixen un producte que sustenta una plataforma bàsica per al subministrament de les dades homogènies i consistents que alimenten els models per a la informació i la gestió del tràfic des de qualsevol centre de control:
La disponibilitat de dades de tràfic procedents de sensors TIC permet una millora substancial en la qualitat de la informació de tràfic pel que fa a la qual generen els sistemes actualment operatius; no obstant això, encara trigarem bastant temps fins que la penetració de les tecnologies TIC sigui suficient per proporcionar només per si mateixa una imatge completa de l’estat del tràfic en la totalitat de la xarxa vial, en particular en les quals corresponen a àrees urbanes de grandària mitjana o gran. Especialment quan les aplicacions que ha de suportar el sistema d’informació requereixen el càlcul en temps real de camins entre parelles origen-destí qualssevol com ocorre en el cas dels sistemes de navegació complets, o els de planificació de viatges que no han de restringir-se a conjunts de camins predeterminats (per importants que siguin). En conseqüència la generació d’informació completa i consistent requereix la utilització de models dinàmics de tràfic que permetin una estimació global de l’estat de la xarxa vial i predir la seva evolució a curt termini en absència d’incidents. In4Mo ha proposat dos models dinàmics de tràfic complementaris:
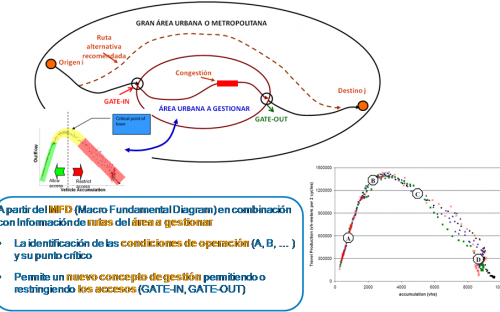
La constatació de que la mateixa informació generada per la combinació de dades fusionades i models de tràfic és la que necessita el responsable de la gestió del tràfic per gestionar una xarxa vial s’ha traduït en In4Mo en una proposta innovadora per la Smart Mobility: la gestió activa basada en el Macro Fundamental Diagram (MFD).
Aquest projecte pertany al programa Acción Estratégica de Telecomunicaciones y Sociedad de la Información, 2010. Subprograma: Avanza Competitividad I+D+I, (2010-2012).

![]()
![]()
J.Barceló, F. Gilliéron, M.P. Linares, O. Serch, L.Montero, The detection layout problem. Paper 12-2056, accepted for publication in Transportation Research Records: Journal of the Transportation Research Board, to appear in 2012.
J.Barceló, L.Montero, M.Bullejos, O. Serch and C. Carmona, A Kalman Filter Approach for the Estimation of Time Dependent OD Matrices Exploiting Bluetooth Traffic Data Collection, Paper #12-3843, presented at the 91st TRB Annual Meeting, January 2012, included in the Compendium of Papers.
J.Barceló, L.Montero, L. Marqués and C. Carmona, Travel time forecasting and dynamic of estimation in freeways based on Bluetooth traffic monitoring, Transportation Research Records: Journal of the Transportation Research Board, Vol. 2175 (2010), pp. 19-27
Un equip de la UPC desenvolupa un sistema per una millor gestió de la mobilitat, xip/tx, 30 abril 2013