
Un dels principals reptes que afronten les persones amb mobilitat reduïda quan viatgen amb el seu propi vehicle a zones noves és la manca d’informació sobre on trobar places d’aparcament accessibles i les seves condicions d’ús. Tot i que algunes grans ciutats ofereixen aquesta informació a través de plataformes oficials com la pàgina web de l’ajuntament o aplicacions mòbils, això no constitueix un estàndard universal i sovint aquesta informació no està disponible en municipis petits. Aquest estudi proposa una solució per mitigar aquests problemes mitjançant la detecció de places accessibles utilitzant intel·ligència artificial aplicada a imatges satel·litals. L’objectiu és desenvolupar una base de dades actualitzada que pugui ser utilitzada per mapes interactius i aplicacions mòbils, permetent als usuaris localitzar espais d’estacionament accessibles i accedir a informació detallada sobre les seves característiques i normatives d’ús.
Introducció i context
Les persones amb mobilitat reduïda (PMR) sovint s’enfronten a grans dificultats quan intenten trobar places d’aparcament en ciutats o pobles desconeguts. Aquests problemes s’agreugen encara més per l’absència d’un conjunt estandarditzat de normatives, ja que, històricament, cada ajuntament ha estat responsable de gestionar les regles relatives a l’estacionament accessible, i aquestes poden variar significativament entre municipis. Algunes de les diferències clau inclouen:
- Requisits de permís: algunes ciutats exigeixen un identificador específic per a vehicles PMR, com ara la targeta blava.
- Simbologia de les senyals de trànsit: el disseny de les senyals d’aparcament accessible pot variar, amb diferències en símbols, colors o formes.
- Indicacions al carrer: les ciutats poden utilitzar diferents mètodes per marcar les places accessibles, com ara senyals de trànsit, marques vials o una combinació de totes dues.
- Permís en zones restringides: les normes sobre l’ús de zones de càrrega i descàrrega o àrees amb horari restringit per a persones amb mobilitat reduïda poden variar; algunes ciutats permeten l’accés mentre que altres estableixen restriccions.
Per fer front a aquests reptes, tant les administracions públiques com les organitzacions sense ànim de lucre han impulsat iniciatives complementàries. En l’àmbit polític, la Unió Europea ha emès diversos marcs legislatius clau—com ara la Directiva INSPIRE (UE), l’Acta Europea d’Accessibilitat (UE) i els programes de finançament de Mobilitat Urbana (UE)—que exigeixen conjuntament l’harmonització, publicació i interoperabilitat de dades geoespacials i d’accessibilitat entre els estats membres, promovent així la provisió de places PMR designades, l’adopció de bones pràctiques en la planificació de la mobilitat urbana i una millor accessibilitat a la informació sobre aquestes ubicacions.
Paral·lelament, les organitzacions sense ànim de lucre utilitzen portals web i aplicacions mòbils per recopilar i compartir informació sobre places PMR, principalment mitjançant dues metodologies de recollida de dades:
- Portals de dades obertes dels ajuntaments:
• Els municipis publiquen conjunts de dades geoespacials (per exemple, GeoJSON, CSV) amb coordenades GPS, restriccions horàries i notes específiques sobre les places PMR.
• Alguns portals ofereixen APIs per consultar en temps real la disponibilitat a través de sensors d’estacionament o sistemes de tiquetatge. - Recollida col·laborativa impulsada per voluntariat:
• Els voluntaris identifiquen i registren ubicacions d’aparcament accessible, pugen fotografies i documenten les condicions in situ (com marques i senyals) mitjançant formularis digitals estandarditzats.
• Les dades recollides inclouen el tipus de plaça, la claredat de la senyalització, l’estat de la superfície i la proximitat als punts d’accés.
Tanmateix, ambdós enfocaments presenten limitacions. En el cas de les dades obertes, la informació proporcionada pels ajuntaments sovint és obsoleta o inexistent, especialment en municipis petits. Pel que fa a les dades recollides per voluntariat, l’exactitud i coherència de la informació comunicada pot ser difícil de verificar, ja que depèn fortament de la bona voluntat i la diligència dels col·laboradors.
És en aquest context que l’associació sense ànim de lucre AsoPMR, dedicada a la mobilitat inclusiva, té com a objectiu digitalitzar la informació sobre aparcaments accessibles mitjançant la seva aplicació mòbil Park4Dis. No obstant això, mantenir una base de dades actualitzada emprant els mètodes de recollida de dades actuals, costosos i poc eficients, continua sent un repte important. A la llum d’això, aquest estudi es proposa respondre les següents preguntes de recerca:
- Existeixen estratègies alternatives per obtenir informació sobre la ubicació de les places d’aparcament accessibles?
- Quins tipus d’informació es poden obtenir mitjançant aquestes estratègies alternatives i quines són les seves principals limitacions?
- Com es pot gestionar la variabilitat en els sistemes de senyalització i marcació entre diferents municipis?
- És possible mantenir una base de dades actualitzada de forma constant?
- Es pot dissenyar un sistema automatitzat per actualitzar aquesta base de dades en temps real?
- Si aquest sistema automatitzat és factible, quina fiabilitat s’espera que tingui?
Les respostes a aquestes preguntes es faran servir per desenvolupar una solució innovadora per a la detecció automatitzada i global, així com per al manteniment d’una base de dades actualitzada de places d’aparcament accessibles, accessible a través d’aplicacions interactives web o mòbils (com ara Spot4Dis).
1. Hipòtesi
Per tal de respondre les preguntes de recerca, es consideren les següents condicions i possibles solucions:
- Recollida de dades: un mecanisme automatitzat per a la recopilació directa de dades sobre aparcaments PMR des de fonts primàries, amb capacitat per detectar en temps útil noves incorporacions o eliminacions.
- Ubicació: dades d’aparcament georeferenciades amb alta precisió posicional.
- Robustesa davant la disparitat de senyals: capacitat per identificar places PMR malgrat les variacions en la senyalització.
- Restriccions d’ús: disponibilitat d’informació sobre les condicions d’ús de les places.
Davant aquestes condicions, la solució proposada empra un sistema visual integrat en un mecanisme per detectar places PMR en imatges, seguint una metodologia similar a la utilitzada per les iniciatives de localització impulsades per voluntariat. Aquest procés inclou la identificació de senyals o marques designadores en imatges (potencialment panoràmiques a nivell de carrer o imatges aèries/satel·litals) i l’enregistrament precís de les seves ubicacions. Les metodologies de detecció d’objectes permetran identificar les places PMR i determinar-ne les coordenades geogràfiques, així com la informació rellevant per a la seva incorporació en la base de dades.
Aquest estudi proposa una solució innovadora que utilitza imatges per satèl·lit (Figura 1) i intel·ligència artificial per a la detecció global de places d’aparcament accessibles i el manteniment de la base de dades corresponent, accessible mitjançant mapes interactius. Aquest enfocament té com a objectiu proporcionar informació precisa i actualitzada, superant les limitacions de les fonts de dades actuals i millorant l’accessibilitat per a les persones amb mobilitat reduïda.
2. Revisió de la literatura
2.1. Intel·ligència artificial
L’aprenentatge profund (deep learning, DL), i en particular les xarxes neuronals convolucionals (CNNs), van revolucionar la classificació d’imatges l’any 2012 (Krizhevsky et al., 2012). Aquest avenç es va estendre a la detecció d’objectes, donant lloc a diverses metodologies per a la detecció i segmentació. Actualment, dominen dues grans famílies de detectors: els mètodes de dues etapes (Girshick et al., 2014; Ren et al., 2017), sovint basats en arquitectures de xarxes neuronals recurrents (RNN), i els mètodes d’una sola etapa (Redmon et al., 2016; YOLO, 2024), que aprofiten CNNs. Més recentment, han aparegut com a alternativa les arquitectures basades en Transformers (Carion et al., 2020). En el camp dels Sistemes de Transport Intel·ligent (ITS), els mètodes esmentats per a la detecció i reconeixement d’objectes en imatges s’han aplicat a la detecció de senyals de trànsit en imatges de visió urbana. Un exemple destacat és el treball seminal de Zhu et al. (2016), que va presentar el banc de proves Tsinghua-Tencent 100K, una cadena completa de detecció i classificació, i va obrir la porta a l’adopció generalitzada de detectors d’una sola etapa en l’àmbit ITS.
2.2. Imatges per satèl·lit
Les imatges aèries i per satèl·lit tradicionalment s’han orientat a dades geoespacials i s’han utilitzat per a la cartografia, estudis topogràfics, monitoratge ambiental, control agrícola, etc. Els avenços en classificació i detecció d’imatges han ampliat aquestes aplicacions tradicionals i han obert la possibilitat de resoldre nous problemes mitjançant el tiling d’imatges (fragmentació d’imatges satel·litals grans en porcions manejables per als mètodes d’aprenentatge profund), per tal de dur a terme tasques de segmentació i classificació (Ulmas i Liiv, 2020), detecció d’objectes (Kang et al., 2022) i georeferenciació (Khatua et al., 2024).
2.3. Imatges per satèl·lit en sistemes intel·ligents de transport (ITS)
En els Sistemes de Transport Intel·ligent (ITS), les imatges per satèl·lit s’han utilitzat en casos d’ús molt concrets, com ara l’estimació del volum de trànsit en ciutats (Larsen et al., 2009) o la detecció de places d’aparcament (Zambanini et al., 2020). L’ús limitat d’imatges per satèl·lit es deu a la baixa freqüència d’adquisició de dades, ja que els satèl·lits habitualment només revisiten una àrea específica un cop cada dues setmanes. Això les fa inadequades per a aplicacions en temps real com ara la predicció del trànsit o l’ocupació de places d’aparcament, que són dos dels casos d’ús més comuns.
2.4. Proposta basada en la literatura

Basant-se en la literatura existent i el context exposat a la Secció 1, aquest estudi proposa l’ús de la intel·ligència artificial aplicada a imatges per satèl·lit per a la detecció automatitzada de places d’aparcament accessibles, motivat per la baixa freqüència amb què es creen noves places. Per al mètode de detecció, es farà servir l’algorisme YOLO (Redmon et al., 2016), segons la literatura que en destaca el bon rendiment i l’àmplia adopció dins el camp dels ITS.
3. Consideracions teòriques
3.1. Mètodes d’aprenentatge profund per a la detecció d’imatges
Les xarxes neuronals convolucionals (CNN) són fonamentals per a la detecció d’objectes en l’aprenentatge profund contemporani (DL), tal com s’ha descrit a la secció 2.1. Aquestes xarxes consisteixen en capes convolucionals interconnectades que extreuen característiques visuals aplicant filtres que poden aprendre, produint mapes de característiques (feature maps). Les capes de pooling redueixen la complexitat i milloren la invariància davant les translacions. Les capes plenament connectades (fully connected) posteriors actuen com a classificadors, proporcionant la classificació final a partir de les característiques apreses.
Per a la detecció d’objectes, el model prediu la classe de l’objecte i les caixes delimitadores (bounding boxes). Els detectors d’una sola etapa, com YOLO, fan aquesta tasca en una sola passada, oferint així més eficiència computacional en comparació amb els mètodes de dues etapes o els basats en Transformers. L’evolució de YOLO s’ha centrat en millores arquitectòniques del tipus backbone-neck-head per a l’extracció de característiques, l’agregació i la predicció final (caixes i puntuacions de confiança), amb avenços recents enfocats a millorar la detecció d’objectes petits, essencial per a l’anàlisi d’imatges satel·litals (YOLO, 2024).
Els models YOLO ofereixen diverses mètriques per avaluar la qualitat del model en relació amb la tasca per a la qual ha estat entrenat. En aquest treball, s’utilitzen les següents:
- Intersecció sobre la Unió (IoU): L’IoU quantifica el solapament entre la caixa prevista (Bp) i la caixa real (Bgt), amb valors que van de 0 (cap solapament) a 1 (solapament perfecte). Un llindar de 0,5 sol definir un positiu real.
On:
– Àrea(Bp ∩ Bgt): És l’àrea de la regió de solapament entre la caixa prevista (Bp) i la caixa real o veritable (Bgt).
– Àrea(Bp ∪ Bgt) = Àrea(Bp) + Àrea(Bgt) − Àrea(Bp ∩ Bgt): És l’àrea total coberta per ambdues caixes delimitadores.
- Confiança (Confidence): La confiança de la caixa delimitadora (bounding box) en YOLO indica el grau de certesa del model respecte a la presència d’un objecte i la precisió de la caixa. Es calcula com el producte de dues probabilitats: la probabilitat que hi hagi un objecte dins la caixa (
P(object)) i la intersecció sobre la unió (IoU) entre la caixa prevista i la caixa real (IoUtruthpred)
- Precisió mitjana a IoU del 50% (mAP50): La precisió mitjana (mAP) a un llindar d’IoU específic (per exemple, 0,5) calcula la Precisió Promig (AP) per a cada classe d’objecte (
APi) i després fa la mitjana d’aquests valors per obtenir el resultat global.
On APi es calcula trobant l’àrea sota la corba de precisió-recuperació (Precision-Recall).
3.2. Imatges per satèl·lit
La teoria de les imatges per satèl·lit inclou el procés d’adquisició de dades, la seva transformació posterior i els diversos sensors emprats, els quals influeixen significativament en la utilitat final de les imatges adquirides:
- Adquisició de dades: els satèl·lits utilitzen sensors per registrar la radiació electromagnètica reflectida/emesa en diferents longituds d’ona. El disseny del sensor (rang espectral, resolució espacial) determina la informació capturada.
- Preprocessament: essencial per corregir distorsions:
- Correccions geomètriques: rectifiquen inexactituds espacials (angle de visió, curvatura terrestre, geometria del sensor) per superposar les imatges amb altres conjunts de dades de forma precisa.
- Correccions radiomètriques: aborden errors en les intensitats de radiació (efectes atmosfèrics, calibració del sensor, il·luminació solar) per garantir una representació acurada de la reflectància/emissió superficial.
- Millora d’imatges: millora la interpretabilitat per a l’anàlisi.
- Productes derivats: adaptats a aplicacions específiques; per a la detecció d’objectes, són crucials les imatges ortorectificades (corregides geomètricament per tenir escala uniforme, tenint en compte el relleu del terreny i la perspectiva del sensor).
Els diferents tipus de sensors inclouen:
- Imatges òptiques: capturen la llum visible i l’infraroig proper reflectits, semblant a la visió humana però amb múltiples bandes espectrals.
- Imatges radar (SAR): transmeten i mesuren activament la radiació de microones retrodispersada, permetent la captura tant de dia com de nit i a través dels núvols.
- Imatges multiespectrals: recullen dades en unes poques (3–10) bandes espectrals amples (incloent l’infraroig), facilitant l’anàlisi de la composició i condició superficial (com la salut de la vegetació, qualitat de l’aigua, cobertes del sòl).
- Imatges hiperespectrals: capturen dades en centenars o milers de bandes espectrals estretes i contigües, proporcionant signatures espectrals detallades (com una “empremta digital”) útils per identificar materials (per exemple, pintura en senyals) i detectar variacions subtils.
Pots trobar més informació sobre la teoria de les imatges per satèl·lit a Economy (2023) i Houtz (2024).
4. Metodologia
4.1. Preprocessament de dades
S’adquireix una gran imatge satel·lital amb una resolució de 14 cm/píxel d’un proveïdor (UP42), després d’especificar l’àrea d’interès. Aquesta imatge es segmenta en fragments més petits i manejables (tessel·lació), que després es projecten al sistema de coordenades Mercator EPSG:3857, obtenint així rajoles XYZ.
Les rajoles obtingudes es filtren utilitzant la informació proporcionada pels tècnics urbanístics (normalment a partir d’un shapefile) per descartar zones sense carreteres. Finalment, les rajoles es combinen en grups de 9 adjacents per crear imatges de mida fixa (256×256 píxels). Aquesta combinació ha demostrat ser eficaç per evitar que una plaça d’aparcament quedi dividida entre dues imatges.
Després de l’adquisició de les imatges, un subconjunt d’aquestes es sotmet a anotació manual per etiquetar les senyals viàries que indiquen la ubicació de les places d’aparcament accessibles, concretament el senyal V-15 (vegeu Figura 2). Aquest procés d’anotació es realitza amb el programari CVAT, seguint els criteris següents:
- Només etiquetar si el 75% del senyal és visible malgrat alguna oclusió (si està tallada per la vora de la imatge, no s’ha d’etiquetar).
- Només etiquetar si el senyal és visible i detectable. Cal evitar casos on la qualitat de la imatge sigui tan baixa que la presència de la plaça PMR només es pugui intuir.
- Els senyals V-15 poden aparèixer en diversos estils. Si és recognoscible i genèric, es pot etiquetar.

Quan existeixen dades obertes sobre la ubicació de places PMR per a la ciutat analitzada, aquestes es fan servir per guiar el procés d’anotació. Donada l’heterogeneïtat dels senyals V-15 entre i dins de les ciutats, s’utilitza una nomenclatura estandarditzada durant l’etiquetatge: cada etiqueta segueix el format V15-XYZ, on X és el color del senyal, Y el color de fons i Z la forma del fons. A més, es fa servir l’etiqueta piano per indicar les places PMR delimitades per línies blanques que en marquen els límits. Es mostren exemples a la Figura 3.





Fig. 3: Exemples de diverses marques que indiquen una plaça d’aparcament designada per a PMR.
Amb les imatges etiquetades, s’entrena un model YOLO per aprendre les característiques visuals del senyal V-15. Un cop finalitzat l’entrenament, la resta d’imatges s’utilitzen per avaluar la precisió del model en la detecció de places d’aparcament accessibles. En cas de disposar d’un model ja entrenat, es poden ometre les fases d’anotació i entrenament, i les imatges es processen directament amb el model per a la detecció automatitzada de places d’aparcament accessibles.
4.2. Resultats del model
La figura 4a mostra un resultat del model, on es detecten clarament les quatre places d’aparcament accessibles presents a la imatge. Per a cada marca detectada, el model proporciona l’etiqueta de classificació corresponent i una puntuació de confiança associada. Es pot observar que el model també mostra un fals positiu amb una confiança de 0,5, classificant erròniament una tapa de claveguera com si fos un senyal V-15.
La figura 4b mostra una altra imatge amb les deteccions del model, on es demostra un error de detecció en no identificar una de les places PMR. Per reduir l’ocurrència de falsos positius, s’ha implementat un mecanisme de filtratge, aplicant un llindar mínim de confiança per considerar una detecció com a vàlida, complementat amb verificació manual.
Finalment, les places PMR detectades es georeferencien, i la informació es exporta a la base de dades.
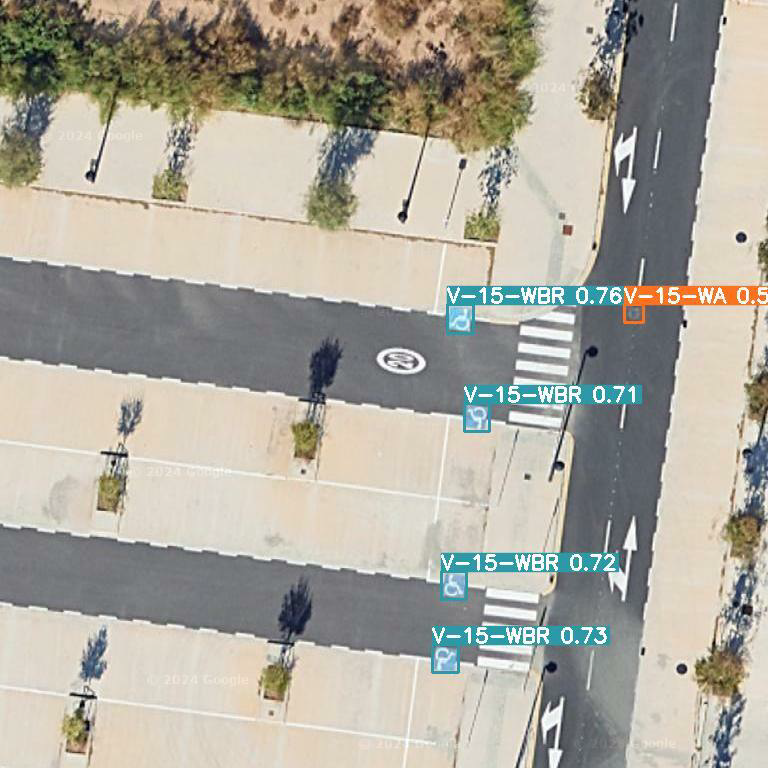
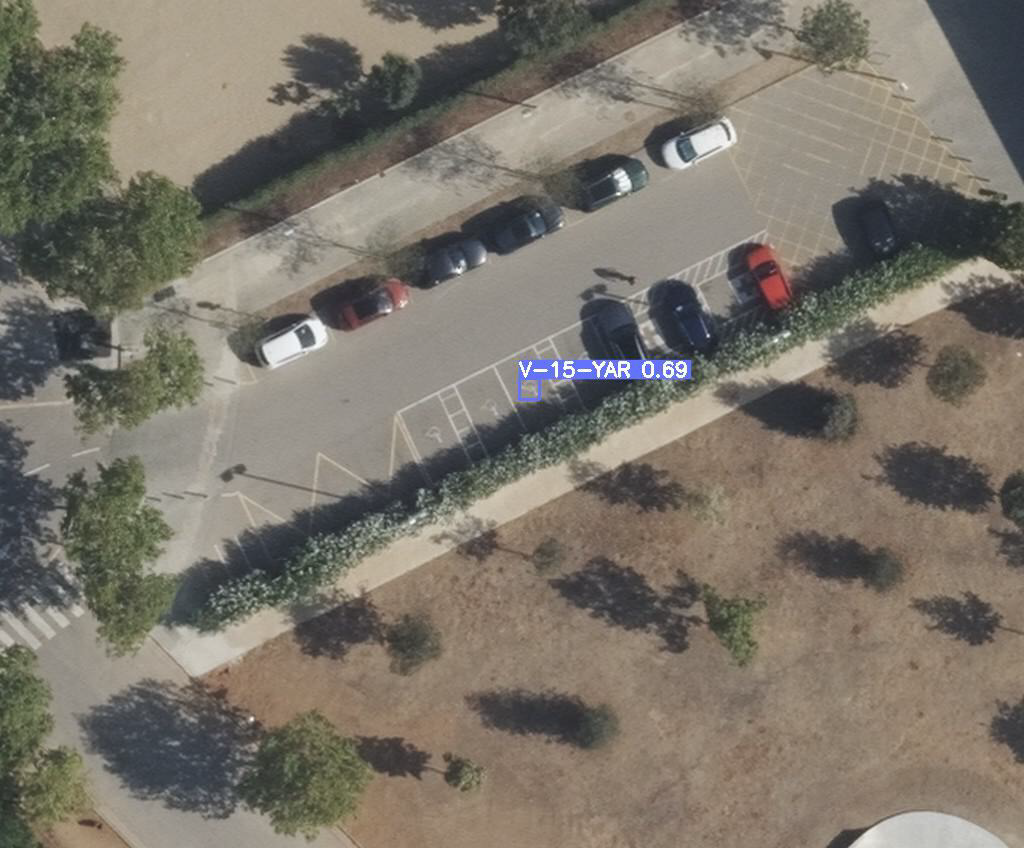
Fig. 4: Imatges amb les deteccions realitzades pel model.
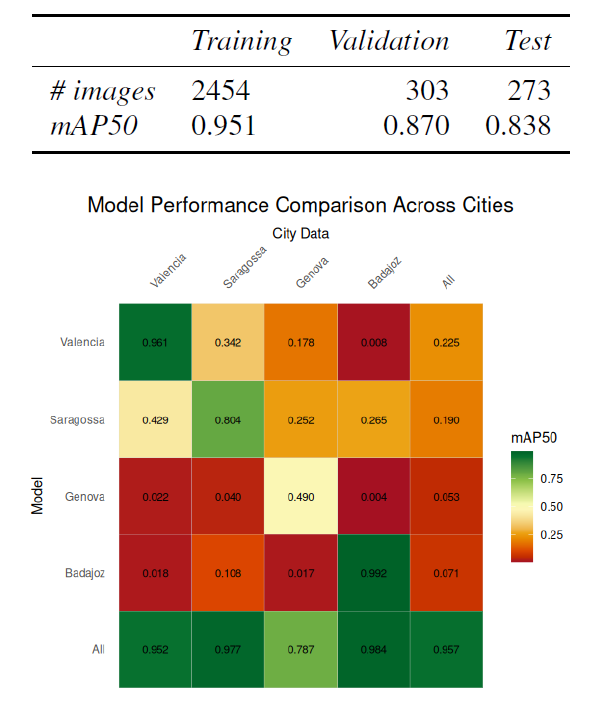
Taula 1: Resultats generals obtinguts del model entrenat amb imatges de totes les ciutats.
5. Resultats
Com a part del projecte, el sistema proposat es va provar en quatre pilots: València, Saragossa, Badajoz i Gènova.
Els experiments van utilitzar dues estratègies d’entrenament: models específics per ciutat i un model unificat per a totes les ciutats. La figura 5 compara les puntuacions de mAP50 obtingudes, mostrant que els models específics per ciutat tenien una capacitat de generalització pobra, mentre que el model unificat aconseguia un rendiment més equilibrat i millor. Cal destacar que el pilot de Gènova va mostrar puntuacions més baixes dins del model unificat.
Una revisió manual va revelar que això es devia a la menor mida i a l’etiquetatge diferent del senyal V-15 (específicament “V-15-WBR”) a Gènova en comparació amb les ciutats espanyoles, cosa que va causar confusió al model. La Taula 1 mostra els resultats globals obtinguts amb el model entrenat amb imatges de tots els pilots.
Aquests resultats suggereixen que l’enfocament proposat per detectar places PMR mitjançant imatges satel·litals és factible en diferents ciutats, tot i que encara és possible fer optimitzacions addicionals.
6. Conclusions i línies futures de recerca
6.1. Conclusions
Els resultats obtinguts són prometedors i confirmen que l’enfocament proposat per obtenir les places PMR d’una ciutat és viable, i que el model unificat és el camí a seguir. Tot i això, la disparitat en els criteris de referència de les places PMR entre ciutats obliga a desenvolupar models de classificació que s’adaptin a senyalitzacions horitzontals diverses, cosa que dificulta l’ús d’un model únic, com s’ha vist amb la inclusió de Gènova.
El mètode proposat presenta limitacions inherents derivades de la seva dependència d’imatges satel·litals:
- Oclusions: Obstruccions com ombres d’edificis, vehicles estacionats dins les places PMR o cobertes d’arbres sovint impedeixen detectar correctament les marques al terra. Tot i que la fusió temporal d’imatges durant el preprocessament pot ajudar a mitigar aquest problema mitjançant vistes multitemporals d’un mateix lloc, l’eliminació completa és difícil.
- Restriccions d’ús: La perspectiva zenital pròpia de les imatges satel·litals impedeix obtenir informació sobre les restriccions d’ús, que habitualment es comuniquen mitjançant senyalització vertical a nivell de carrer.
- Falsos positius: Tot i la bona fiabilitat del sistema, la heterogeneïtat de les marques al terra i la similitud visual entre senyals semànticament diferents (com el V-15 i les marques de carril bici) contribueixen a la detecció de falsos positius. Ampliar el volum de dades d’entrenament hauria de reduir la freqüència d’aquests errors.
6.2. Línies futures de treball
Tot i que les preguntes de recerca plantejades a la Secció 1 han estat abordades, el sistema presenta limitacions en la determinació de les restriccions d’ús i en la detecció de places PMR ocultes, la qual cosa indica que hi ha objectius que encara no s’han assolit. El treball futur hauria d’explorar l’ús de panoràmiques a nivell de carrer, que podrien proporcionar informació provinent de senyalització vertical i ajudar a mitigar les oclusions.