
Uno de los principales desafíos a los que se enfrentan las personas con movilidad reducida cuando viajan con sus propios vehículos a zonas nuevas es la falta de información sobre dónde encontrar plazas de aparcamiento accesibles y las restricciones de uso asociadas. Aunque algunas grandes ciudades ofrecen esta información a través de plataformas oficiales, como la página web del ayuntamiento o una aplicación móvil, esto no es un estándar universal y, con frecuencia, esta información no está disponible en pueblos pequeños. Este estudio propone una solución para aliviar estos problemas mediante la detección de plazas de aparcamiento accesibles utilizando inteligencia artificial aplicada a imágenes satelitales. El objetivo es desarrollar una base de datos actualizada que pueda ser utilizada por mapas interactivos y aplicaciones móviles para que los usuarios puedan localizar plazas de aparcamiento accesibles y acceder a información detallada sobre sus características y normativas de uso.
Introducción y contexto
Las personas con movilidad reducida (PMR) suelen enfrentarse a importantes desafíos cuando intentan localizar plazas de aparcamiento en ciudades o pueblos desconocidos. Estos problemas se ven aún más agravados por la ausencia de un conjunto de normativas estandarizadas, ya que, históricamente, cada ayuntamiento ha sido responsable de gestionar las reglas que rigen las plazas de aparcamiento accesibles, y dichas reglas pueden diferir significativamente entre ciudades.
Las diferencias clave incluyen:
- Requisitos de permiso: algunas ciudades exigen un identificador específico para los vehículos PMR, como una tarjeta azul.
- Simbología de las señales de tráfico: el diseño de las señales para el aparcamiento accesible puede variar, presentando diferencias en símbolos, colores o formas.
- Indicaciones en la vía pública: las ciudades pueden utilizar distintos métodos para señalizar las plazas de aparcamiento accesibles, como señales verticales, marcas viales o una combinación de ambas.
- Permiso para zonas restringidas: las normas sobre el uso de zonas de carga y descarga o áreas con límite de tiempo por parte de personas con movilidad reducida pueden variar; algunas ciudades permiten el acceso, mientras que otras imponen restricciones.
Para hacer frente a estos desafíos, tanto las autoridades públicas como las organizaciones sin ánimo de lucro han puesto en marcha iniciativas complementarias. A nivel político, la Unión Europea ha emitido varios marcos normativos clave —en particular, la Directiva INSPIRE (UE), la Ley Europea de Accesibilidad (UE) y los programas de financiación para la Movilidad Urbana (UE)— que, en conjunto, exigen la armonización, publicación e interoperabilidad de los datos geoespaciales y de accesibilidad entre los estados miembros. Todo ello promueve la provisión de plazas de aparcamiento designadas para personas con movilidad reducida, la adopción de buenas prácticas en la planificación de la movilidad urbana y un mejor acceso a la información sobre estas ubicaciones.
Paralelamente, las organizaciones sin ánimo de lucro utilizan portales web y aplicaciones móviles para recopilar y compartir información sobre plazas de aparcamiento PMR, principalmente a través de dos métodos de adquisición de datos:
- Portales de datos abiertos de los ayuntamientos:
• Los municipios publican conjuntos de datos geoespaciales (por ejemplo, GeoJSON, CSV) que contienen coordenadas GPS, restricciones horarias y notas especiales sobre las plazas PMR.
• Algunos portales ofrecen APIs que permiten consultar en tiempo real la disponibilidad mediante sensores de aparcamiento o sistemas de ticketing. - Colaboración ciudadana basada en voluntariado:
• Los voluntarios identifican y registran ubicaciones de plazas de aparcamiento accesibles, suben fotografías y documentan las condiciones del lugar (por ejemplo, marcas, señalización) utilizando formularios digitales estandarizados.
• Los datos recogidos incluyen el tipo de plaza, la claridad de la señalización, el estado de la superficie y la proximidad a puntos de acceso.
Sin embargo, ambos enfoques presentan limitaciones. En el caso de los datos abiertos, la información proporcionada por los ayuntamientos suele estar desactualizada o no estar disponible, especialmente en localidades pequeñas. En cuanto a los datos recopilados mediante colaboración ciudadana, la precisión y la coherencia de la información reportada pueden ser difíciles de verificar, ya que dependen en gran medida de la buena voluntad y la diligencia de los colaboradores. Es en este contexto que la asociación sin ánimo de lucro AsoPMR, dedicada a la movilidad inclusiva, tiene como objetivo digitalizar la información sobre aparcamientos accesibles a través de su aplicación móvil Park4Dis. Sin embargo, mantener una base de datos actualizada utilizando los actuales métodos de recopilación de datos, que son costosos e ineficientes, sigue representando un desafío importante. A la luz de lo anterior, este estudio se propone abordar las siguientes preguntas de investigación:
- ¿Existen estrategias alternativas para obtener información sobre la ubicación de las plazas de aparcamiento accesibles?
- ¿Qué tipos de información pueden obtenerse mediante estas estrategias alternativas y cuáles son sus principales limitaciones?
- ¿Cómo puede gestionarse la variabilidad en las convenciones de señalización y marcaje entre distintos municipios?
- ¿Es posible mantener una base de datos constantemente actualizada de plazas de aparcamiento accesibles?
- ¿Puede diseñarse un sistema automatizado que actualice dicha base de datos en tiempo real?
- Si dicho sistema automatizado es viable, ¿cuál sería su fiabilidad esperada?
Las respuestas a las preguntas anteriores se utilizarán para desarrollar una solución innovadora para la detección automática y global, así como el mantenimiento de una base de datos actualizada de estacionamientos accesibles, accesible mediante aplicaciones web o móviles interactivas (por ejemplo, Spot4Dis).
1. Hipótesis
Para abordar las preguntas de investigación, se consideran las siguientes condiciones y posibles soluciones:
- Recopilación de datos: Un mecanismo automatizado para la recopilación directa de datos sobre estacionamientos para personas con movilidad reducida (PMR) a partir de fuentes primarias, capaz de detectar de manera oportuna adiciones y eliminaciones.
- Ubicación: Datos de estacionamiento georreferenciados con alta precisión posicional.
- Robustez ante disparidad de señalización: Capacidad para identificar plazas PMR independientemente de las variaciones en la señalización.
- Restricción de uso: Provisión de información sobre las restricciones de uso.
Dadas estas condiciones, la solución propuesta emplea un sistema visual dentro de un mecanismo para detectar plazas de estacionamiento para personas con movilidad reducida (PMR) en datos de imagen, imitando los esfuerzos de localización impulsados por voluntarios. Esto implica identificar señales o marcas distintivas en imágenes (potencialmente panorámicas a nivel de calle o imágenes aéreas/satelitales) y registrar con precisión sus ubicaciones. Las metodologías de detección de objetos identificarán luego las plazas PMR y determinarán sus coordenadas geográficas, así como la información relevante para su almacenamiento en una base de datos.
Este estudio propone una solución innovadora que aprovecha imágenes satelitales (Figura 1) y la inteligencia artificial para la detección global de plazas de estacionamiento accesibles y el mantenimiento de una base de datos, accesible mediante mapas interactivos. Este enfoque busca proporcionar información precisa y actualizada, superando las limitaciones de las fuentes de datos actuales y mejorando la accesibilidad para las personas con movilidad reducida.
2. Revisión de la literatura
2.1. Inteligencia Artificial
El aprendizaje profundo (Deep Learning, DL), en particular las Redes Neuronales Convolucionales (CNN), revolucionó la clasificación de imágenes en 2012 (Krizhevsky et al., 2012). Este avance se extendió a la detección de objetos, dando lugar a diversas metodologías para la detección y segmentación. Actualmente, dominan dos principales familias de detectores: los métodos de dos etapas (Girshick et al., 2014; Ren et al., 2017), que a menudo emplean arquitecturas de Redes Neuronales Recurrentes (RNN), y los métodos de una sola etapa (Redmon et al., 2016; YOLO, 2024), que aprovechan las CNN. Más recientemente, han surgido arquitecturas basadas en Transformers como una alternativa (Carion et al., 2020). En los Sistemas de Transporte Inteligente (ITS), los métodos descritos anteriormente para la detección de imágenes y el reconocimiento de objetos se han aplicado a la detección de señales de tráfico en imágenes a nivel de calle. Esto se ejemplifica con el trabajo seminal de Zhu et al. (2016), que introdujo el benchmark Tsinghua-Tencent 100K, presentó una cadena de procesamiento de detección y clasificación de extremo a extremo, y abrió el camino para la adopción de detectores de una sola etapa en el ámbito de los ITS.
2.2. Imágenes satelitales
Las imágenes aéreas y satelitales han sido tradicionalmente adaptadas a datos geoespaciales y utilizadas para cartografía y levantamientos, monitoreo ambiental, control agrícola, entre otros. El avance en la clasificación y detección de imágenes ha potenciado los usos clásicos y ha abierto la posibilidad de resolver nuevos problemas mediante la segmentación de imágenes (dividir grandes imágenes satelitales en fragmentos manejables para métodos de aprendizaje profundo) con el fin de realizar segmentación y clasificación (Ulmas y Liiv, 2020), detección de objetos (Kang et al., 2022) y georreferenciación (Khatua et al., 2024).
2.3. Sistemas Inteligentes de Transporte e Imágenes Satelitales
En los Sistemas Inteligentes de Transporte (ITS), las imágenes satelitales se han utilizado en casos limitados, como la estimación de volúmenes de tráfico en ciudades (Larsen et al., 2009) o para la detección de lugares de estacionamiento (Zambanini et al., 2020). El uso limitado de imágenes satelitales se debe a la baja frecuencia de adquisición de datos, ya que los satélites suelen volver a visitar una área específica solo una vez cada dos semanas. Esto las hace inadecuadas para aplicaciones en tiempo real, como la predicción del tráfico o la ocupación de estacionamientos, dos de los casos de uso más comunes.
2.4. Propuesta fundamentada en la literatura

Basándose en la literatura existente y en el contexto descrito en la Sección 1, este estudio propone el uso de inteligencia artificial aplicada a imágenes satelitales para la detección automatizada de plazas de estacionamiento accesibles, motivado por la baja frecuencia de creación de nuevas plazas. Para el método de detección se utilizará el algoritmo YOLO (Redmon et al., 2016), basado en la literatura que destaca su rendimiento superior y su amplia adopción en los Sistemas Inteligentes de Transporte (ITS).
3. Consideraciones teóricas
3.1. Métodos de aprendizaje profundo para la detección de imágenes
Las CNN son fundamentales en la detección de objetos mediante aprendizaje profundo (DL), como se detalló en la Sección 2.1. Estas redes consisten en capas convolucionales interconectadas que extraen características visuales aplicando filtros aprendibles, generando mapas de características. A continuación, las capas de agrupamiento (pooling) reducen la complejidad y mejoran la invariancia a traslaciones. Las capas totalmente conectadas posteriores actúan como clasificadores, produciendo la clasificación final basada en las características convolucionales aprendidas. Para la detección de objetos, el modelo predice la clase del objeto y las cajas delimitadoras (bounding boxes). Los detectores de una sola etapa, como YOLO, realizan esto en una única pasada hacia adelante, ofreciendo mayor eficiencia computacional que los métodos de dos etapas o basados en Transformers. El desarrollo de YOLO se ha centrado en mejoras arquitectónicas de tipo backbone-neck-head para la extracción de características, su agregación y la predicción final (cajas delimitadoras y niveles de confianza), con esfuerzos recientes para mejorar la detección de objetos pequeños, algo vital para el análisis de imágenes satelitales (YOLO, 2024).
Los modelos YOLO ofrecen diferentes métricas para evaluar la calidad del modelo en la tarea entrenada. De ellas, las que se utilizan en este trabajo son:
- Intersección sobre Unión (IoU): La Intersección sobre Unión (IoU) cuantifica la superposición entre las cajas delimitadoras predichas (Bp) y las reales o de referencia (Bgt), con un valor que va de 0 (sin superposición) a 1 (superposición perfecta). Un umbral de 0,5 se utiliza comúnmente para definir un verdadero positivo.
Dónde:
– Área(Bp ∩ Bgt): El área de la región de superposición entre las cajas delimitadoras predicha y la de referencia.
– Área(Bp ∪ Bgt) = Área(Bp) + Área(Bgt) − Área(Bp ∩ Bgt): El área total cubierta por ambas cajas delimitadoras.
- Confianza: La confianza de la caja delimitadora en YOLO indica la certeza del modelo sobre la presencia del objeto y la precisión de la caja. Se calcula como el producto de dos probabilidades: la probabilidad de que haya un objeto presente en la caja delimitadora (P(objeto)) y la Intersección sobre Unión (IoU) entre la caja delimitadora predicha y la caja de referencia (IoUtruthpred).
- Precisión media promedio al 50% de IoU (mAP50): La mAP en un umbral específico de IoU (por ejemplo, 0.5) calcula la Precisión Promedio (AP) para cada clase de objeto (APi) y luego promedia estos valores de AP a lo largo de todas las clases.
Donde APi se calcula determinando el área bajo la curva de Precisión-Recall.
3.2. Imágenes satelitales
La teoría de las imágenes satelitales abarca la adquisición de datos, su posterior transformación y los diversos sensores empleados, los cuales influyen significativamente en la utilidad final de las imágenes obtenidas:
- Adquisición de datos: Los satélites utilizan sensores para registrar la radiación electromagnética reflejada o emitida a lo largo de diversas longitudes de onda. El diseño del sensor (rango espectral, resolución espacial) determina la información capturada.
- Preprocesamiento: Es esencial para corregir distorsiones:
- Correcciones geométricas: Rectifican inexactitudes espaciales (ángulo de observación, curvatura de la Tierra, geometría del sensor) para una superposición precisa con otros conjuntos de datos.
- Correcciones radiométricas: Abordan errores en las intensidades de la radiación (efectos atmosféricos, calibración del sensor, iluminación solar) para asegurar una representación precisa de la reflectancia o emisión de la superficie.
- Mejora de la imagen: Mejora la interpretabilidad para el análisis.
- Productos derivados: Adaptados a aplicaciones específicas; para la detección de objetos, las imágenes ortorrectificadas (corregidas geométricamente para el relieve del terreno y la perspectiva del sensor, proporcionando una escala uniforme) son fundamentales.
Los diferentes tipos de sensores incluyen:
- Imágenes ópticas: Capturan la luz solar reflejada en el espectro visible y el infrarrojo cercano, de forma análoga a la visión humana pero con múltiples bandas espectrales.
- Imágenes de radar (SAR): Transmiten activamente y miden la radiación de microondas retrodispersada, lo que permite capacidades de captura tanto de día como de noche y a través de nubes.
- Imágenes multiespectrales: Capturan datos en unas pocas (3 a 10) bandas espectrales amplias (incluido el infrarrojo), lo que permite el análisis de la composición y el estado de la superficie (por ejemplo, salud de la vegetación, calidad del agua, cobertura del suelo).
- Imágenes hiperespectrales: Capturan datos en cientos o miles de bandas espectrales estrechas y contiguas, proporcionando firmas espectrales detalladas (“huellas dactilares”) para la identificación de materiales (por ejemplo, pintura en señales) y variaciones sutiles en propiedades.
Se pueden encontrar más detalles sobre la teoría de las imágenes satelitales en Economy (2023) y Houtz (2024).
4. Metodología
4.1. Preprocesamiento de datos
Se adquiere una imagen satelital grande con una resolución de 14 cm/píxel de un proveedor de imágenes satelitales (UP42) tras especificar el área deseada. Esta imagen grande se segmenta en mosaicos más pequeños y manejables (teselación) que luego se proyectan al sistema Mercator EPSG:3857, obteniendo mosaicos XYZ. Los mosaicos obtenidos se filtran utilizando la información proporcionada por los planificadores urbanos (generalmente a partir de un archivo shapefile) para descartar áreas sin carreteras. Finalmente, los mosaicos se combinan en conjuntos de 9 mosaicos adyacentes para crear imágenes de tamaño fijo (256×256). Esta combinación de 9 mosaicos ha demostrado ser efectiva para evitar que las plazas de estacionamiento queden divididas entre imágenes.
Tras la adquisición de las imágenes, un subconjunto de ellas es sometido a anotación manual para etiquetar las señales de tráfico terrestres que indican la ubicación de plazas de estacionamiento accesibles, específicamente la señal V-15 (Figura 2). Este proceso de anotación se realiza utilizando el software CVAT bajo las siguientes premisas:
- Etiquetar únicamente si al menos el 75 % de la señal es visible debido a una posible oclusión por objetos. (Si la señal está cortada en el borde de la imagen, no debe ser etiquetada).
- Etiqueta solo si la señal es visible y detectable. Debemos evitar casos en los que la calidad de la imagen sea tan mala que la presencia de una plaza PMR solo pueda ser suposible.
- Los íconos V15 pueden aparecer en diferentes estilos. Si es reconocible y genérico, puede ser etiquetado.

Donde existen datos abiertos sobre ubicaciones de estacionamientos PMR en la ciudad que se está procesando, esta información se utiliza para guiar el proceso de anotación. Debido a la heterogeneidad de la señalización V-15 entre ciudades e incluso dentro de una misma ciudad, se emplea una nomenclatura estandarizada durante el etiquetado de imágenes. Cada etiqueta sigue el formato V15-XYZ, donde X representa el color de la señal, Y el color del fondo y Z la forma del fondo. Además, se utiliza la etiqueta piano, ya que las plazas PMR están delimitadas con líneas blancas que marcan los límites de cada espacio de estacionamiento. Se presentan ejemplos en la Figura 3.





Fig. 3: Examples of various markings indicating a designated PRM parking space.
Utilizando las imágenes etiquetadas, se entrena un modelo YOLO para que aprenda las características visuales de la señal V-15. Tras el entrenamiento, el resto de las imágenes se utiliza para evaluar la precisión del modelo en la detección de plazas de estacionamiento accesibles. En caso de contar con un modelo ya entrenado, se omiten las fases de anotación y entrenamiento, y las imágenes se procesan directamente con el modelo para la detección automatizada de plazas de estacionamiento accesibles.
4.2. Salida del modelo
La Figura 4a muestra una salida del modelo, evidenciando claramente la detección de las cuatro plazas de estacionamiento accesibles presentes en la imagen. Para cada señal detectada, el modelo proporciona su etiqueta de clasificación y la puntuación de confianza asociada. Se observa que el modelo también presenta una detección falsa positiva con una confianza de 0,5, al clasificar erróneamente una tapa de alcantarilla como una señal V-15. La Figura 4b muestra otra imagen con las detecciones del modelo, en la que se evidencia una falla al no detectar una de las plazas PMR. Para mitigar la aparición de falsos positivos, se implementa un mecanismo de filtrado que aplica un umbral mínimo de confianza para aceptar una detección como válida, complementado con una verificación manual. Finalmente, las plazas de estacionamiento PMR detectadas se georreferencian y la información se exporta a la base de datos.
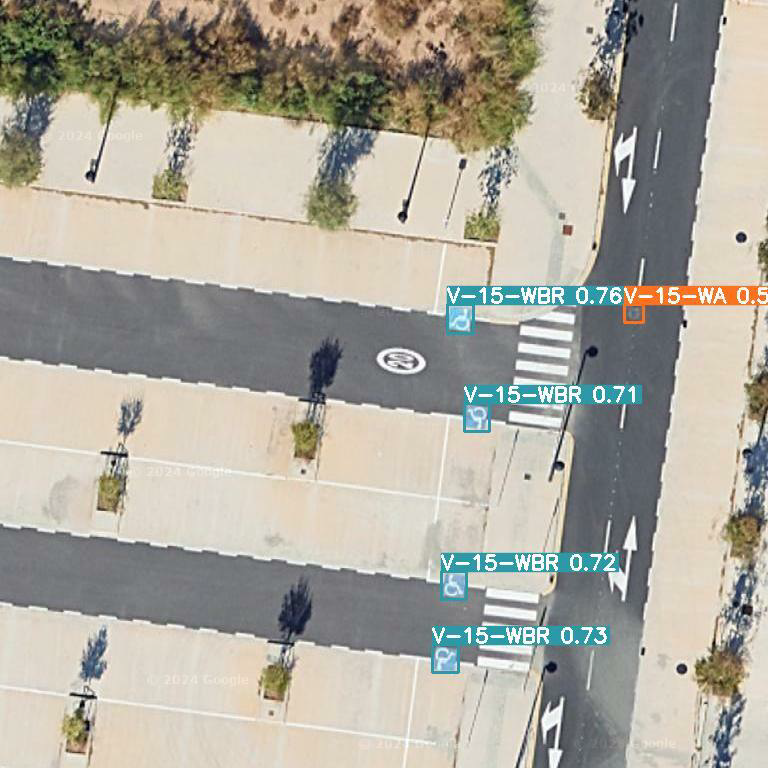
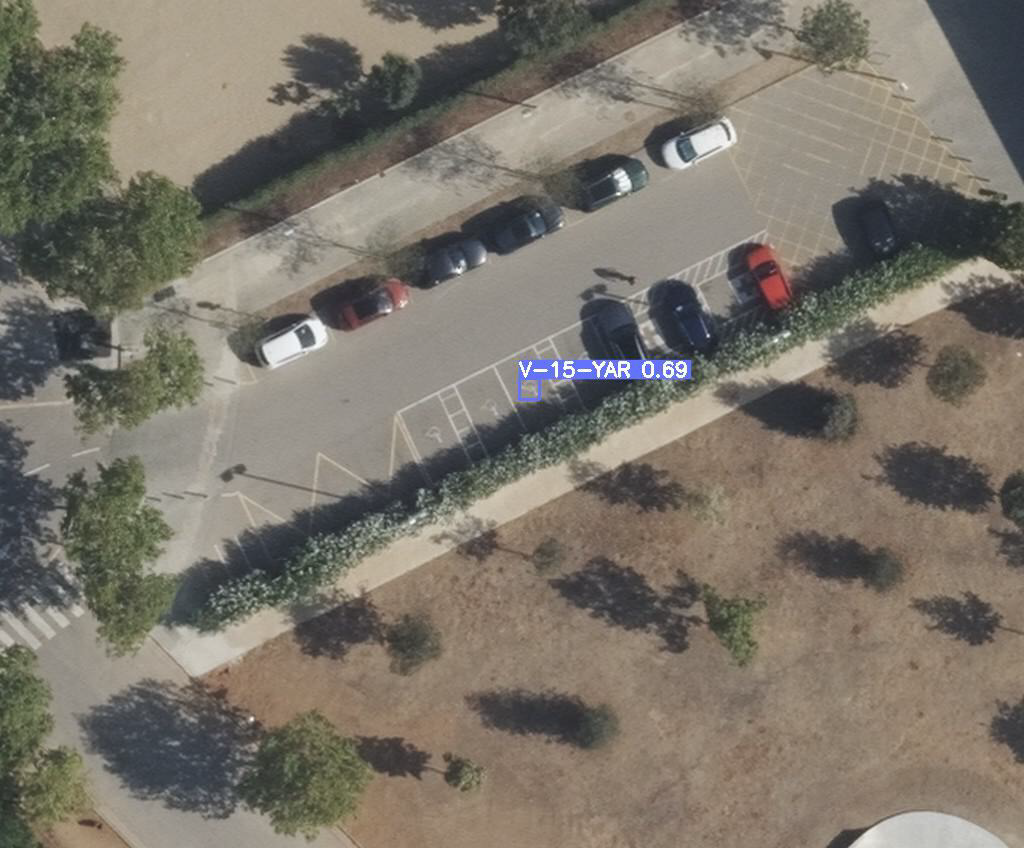
Fig. 4: Imágenes con las detecciones del modelo.
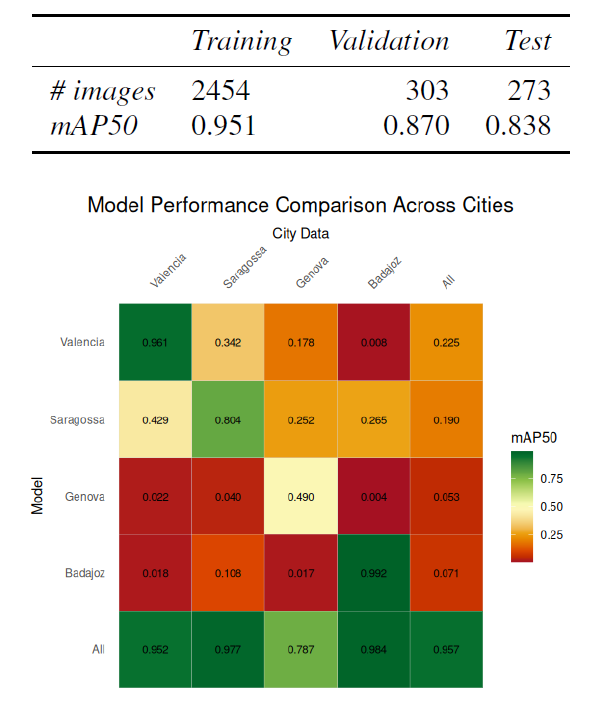
Table 1: Resultados generales obtenidos del modelo entrenado con imágenes de todas las ciudades.
5. Resultados
Como parte del proyecto, el sistema propuesto fue probado en cuatro pilotos: Valencia, Zaragoza, Badajoz y Génova.
Los experimentos emplearon dos estrategias de entrenamiento: modelos específicos por ciudad frente a un modelo unificado para todas las ciudades. La Figura 5 compara las puntuaciones mAP50 resultantes, mostrando una mala generalización por parte de los modelos específicos por ciudad, mientras que el modelo unificado logró un desempeño más equilibrado y mejor. Cabe destacar que el piloto de Génova mostró puntuaciones más bajas en el modelo unificado. La revisión manual reveló que esto se debió al tamaño más pequeño y al etiquetado distinto («V-15-WBR») de la señal V-15 en Génova en comparación con las ciudades españolas, lo que causó confusión en el modelo. La Tabla 1 presenta los resultados generales obtenidos con un modelo entrenado con imágenes de todos los pilotos. Estos hallazgos sugieren que el enfoque propuesto para la detección de plazas de estacionamiento PMR en diferentes ciudades usando imágenes satelitales es viable, aunque es posible una optimización adicional.
6. Conclusiones y futuras investigaciones
6.1. Conclusiones
Los resultados obtenidos parecen prometedores y confirman que el enfoque propuesto para obtener las plazas PMR de una ciudad es viable, y que un modelo unificado es el camino a seguir. Sin embargo, la disparidad en los criterios de referencia para las plazas PMR entre ciudades obliga al desarrollo de modelos de clasificación que se adapten a la diversidad de señalización terrestre, lo que dificulta un modelo unificado, como se observó con la inclusión de Génova.
El método propuesto presenta limitaciones inherentes derivadas de su dependencia en imágenes satelitales:
- Oclusiones: Obstáculos como sombras de edificios, vehículos estacionados dentro de las plazas PMR y copas de árboles dificultan frecuentemente la detección de las marcas de estacionamiento. Aunque la fusión temporal de imágenes durante el preprocesamiento puede mitigar este problema integrando vistas multitemporales del mismo lugar, la eliminación completa resulta desafiante.
- Restricción de uso: La perspectiva inherente de las imágenes aéreas impide la obtención de información sobre las restricciones de uso de las plazas PMR, que normalmente se comunican mediante señalización vertical a nivel de calle.
- Falsos positivos: A pesar de la alta fiabilidad del sistema, la heterogeneidad de las marcas en el suelo y la similitud visual entre señales semánticamente distintas (por ejemplo, la señal V-15 y las marcas de carril bici) contribuyen a la aparición de detecciones falsas positivas. Se espera que aumentar el volumen de datos de entrenamiento reduzca la ocurrencia de estos errores.
6.2. Trabajo futuro
Aunque las preguntas de investigación planteadas en la Sección 1 han sido respondidas, el sistema presenta limitaciones para determinar las restricciones de uso y detectar plazas PMR ocultas, lo que indica objetivos aún no cumplidos. El trabajo futuro debería explorar el uso de panoramas a nivel de calle, que podrían proporcionar información sobre señales verticales y ayudar a mitigar problemas de oclusión.