From September 18 to 20, the Euro Working Group on Transportation (EWGT) took place in Barcelona. The EWGT is a congress organized by the Department of Statistics and Research Operations at UPC.
The chair of the congress was Esteve Codina, collaborating profesor at inLab FIB.
During these three days several works where presented:
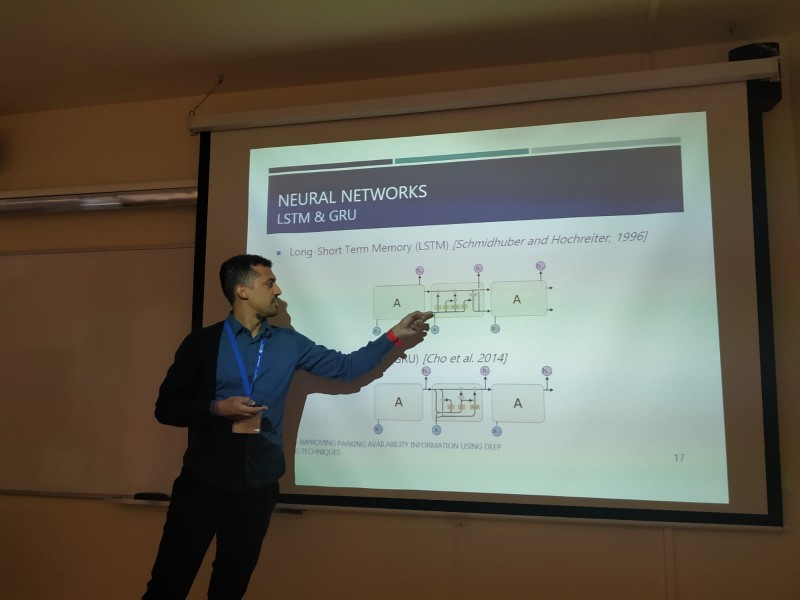
Improving Parking Availability Information Using Deep Learning Techniques
Jamie Arjona, Maria Paz Linares, Josep Casanovas-Garcia and Juan José Vázquez Giménez
Presenter: Jamie Arjona
Abstract. Urban traffic currently affects the quality of life in cities and metropolitan areas as the problem becomes ever more aggravated by parking issues: congestion increases due to individuals looking for slots to park their vehicles. An Internet of Things approach allows drivers to know the state of the parking system in real time through wireless networks of sensor devices. This work focuses on studying the data generated by parking systems in order to develop predictive models that generate forecasted information. This can be useful in improving the management of parking areas. This research begins by looking at the state of the art in predictive methods based on machine learning for time series. This paper then introduces the recurrent neural network methods that were used in this research, namely Long Short-Term Memory and Gated Recurrent Unit, as well as the models developed according to real scenarios in different cities. In order to improve the quality of the models, exogenous variables like hourly weather and calendar effects are taken into account, and the baseline models are compared to the models that used this information. Finally, the preliminary encouraging results are described, followed by suggestions for corresponding future work.
A Multi-Objective Programming Model for Timetables on Corridors Integrating Macroscopic and Microscopic Approaches
Ángel G. Marín and Esteve Codina
Presenter: Esteve Codina
Abstract. It is proposed an integrated framework for timetable design that combines the requirements of service planners, which usually adopt a purely macroscopic point of view of the demand requirements and the conflicts that these timetables may arise at stations. These aspects may not be considered by the service planners since a microscopic analysis of the stations structure is necessary considering possible conflicts at platforms. The proposed integrated model guarantees feasible timetables balancing performance indexes for the passenger and operator interests while guaranteeing feasibility. The differences between optimal timetables for the service planners and those who are operational at stations are kept within specified bounds. The resulting problem has been modelled as a multi-objective Mixed Integer Linear Programming problem. The model can be solved to optimality in reasonable computing time as shown in the tests using the Madrid-Zaragoza-Barcelona high-speed railway network. For this case, a Pareto frontier analysis is performed showing that the problem is well posed. In addition, based on the previous model a heuristic procedure is developed in order to obtain timetables which avoid as much as possible concentrations of arrivals/departures to/at stations, thus allowing for a better recoverability and robustness of the timetable in case of unexpected disruptions.
Using GPS Tracking Data to Validate Route Choice in OD Trips Within Dense Urban Networks
Lídia Montero and Xavier Ros-Roca
Presenter: Lídia Montero
Abstract. Nowadays, there are several companies providing processed or raw global positioning system (GPS) measurements from fleets of commercial vehicles, internet applications or automobile companies. The aim of this paper is to deepen the understanding on the GPS data applicability for transportation modelling purposes by providing systematic and quantified insights into collected data representativeness in describing individuals’ route choice. Unfortunately, real data often contain noise, uncertainty, errors, redundancies or even irrelevant information. Useless models will be obtained when built over incorrect or incomplete data. This is why pre-processing is one of the most critical steps of data analysis in any of its forms. However, pre-processing has not been properly systematized yet, this paper focuses on pre-processing steps required in GPS tracking data together with a proposal to systematize it. Furthermore, the aggregation level is at waypoint location for low latency GPS positions in the trajectory in their trip. Travel time reliability in OD paths are addressed among other OD path characteristics. Route choice in dense urban networks face multiple possibilities and data from new technologies offers the opportunity to understand route choice behaviour.

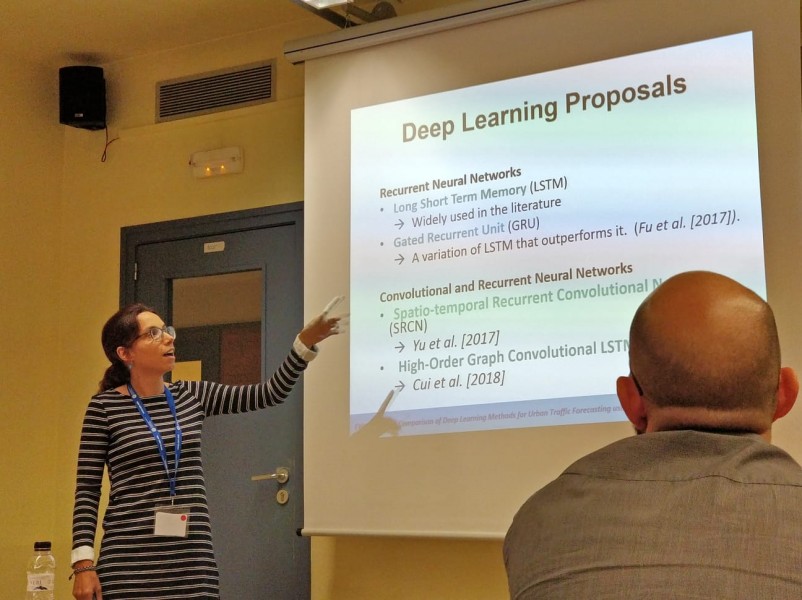
A Comparison of Deep Learning Methods for Urban Traffic Forecasting Using Floating Car Data
Juan José Vázquez Giménez, Jamie Arjona Martínez, Mari Paz Linares Herreros and Josep Casanovas Garcia
Presenter: Mari Paz Linares
Abstract. Cities today must address the challenge of sustainable mobility, and traffic state forecasting plays a key role in mitigating traffic congestion in urban areas. For example, predicting path travel time is a crucial issue in navigation and route planning applications. Furthermore, the pervasive penetration of information and communication technologies makes floating car data an important source of real time data for intelligent transportation system applications. This paper deals with the problem of forecasting urban traffic when floating car data is available. A comparison of four deep learning methods is presented to demonstrate the capabilities of the neural network approaches (recurrent and/or convolutional) in solving the traffic forecasting problem in an urban context. Different tests are proposed in order to not only evaluate the developed deep learning models, but also to analyse how the penetration rates of floating cars affect forecasting accuracy. The presented experiments were designed according to a microscopic traffic simulation approach in order to emulate floating car data fleets, which provide vehicle position and speed, and to validate the obtained results. Finally, some conclusions and further research were presented.